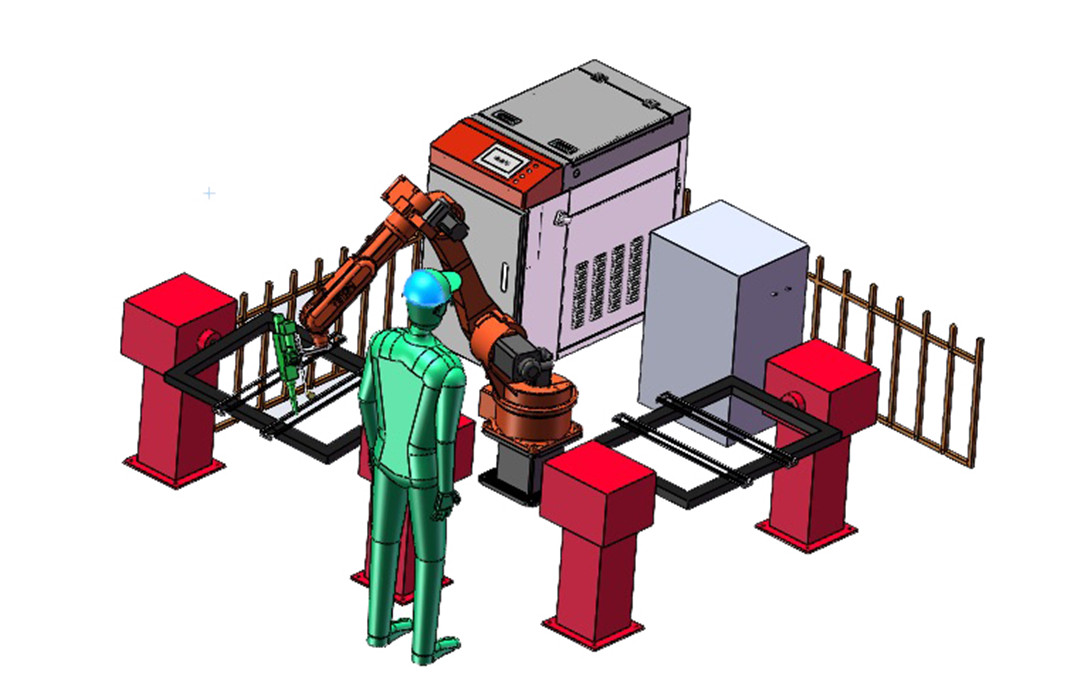
Robotics fib lazè soude machin

Karakteristik ekipman:
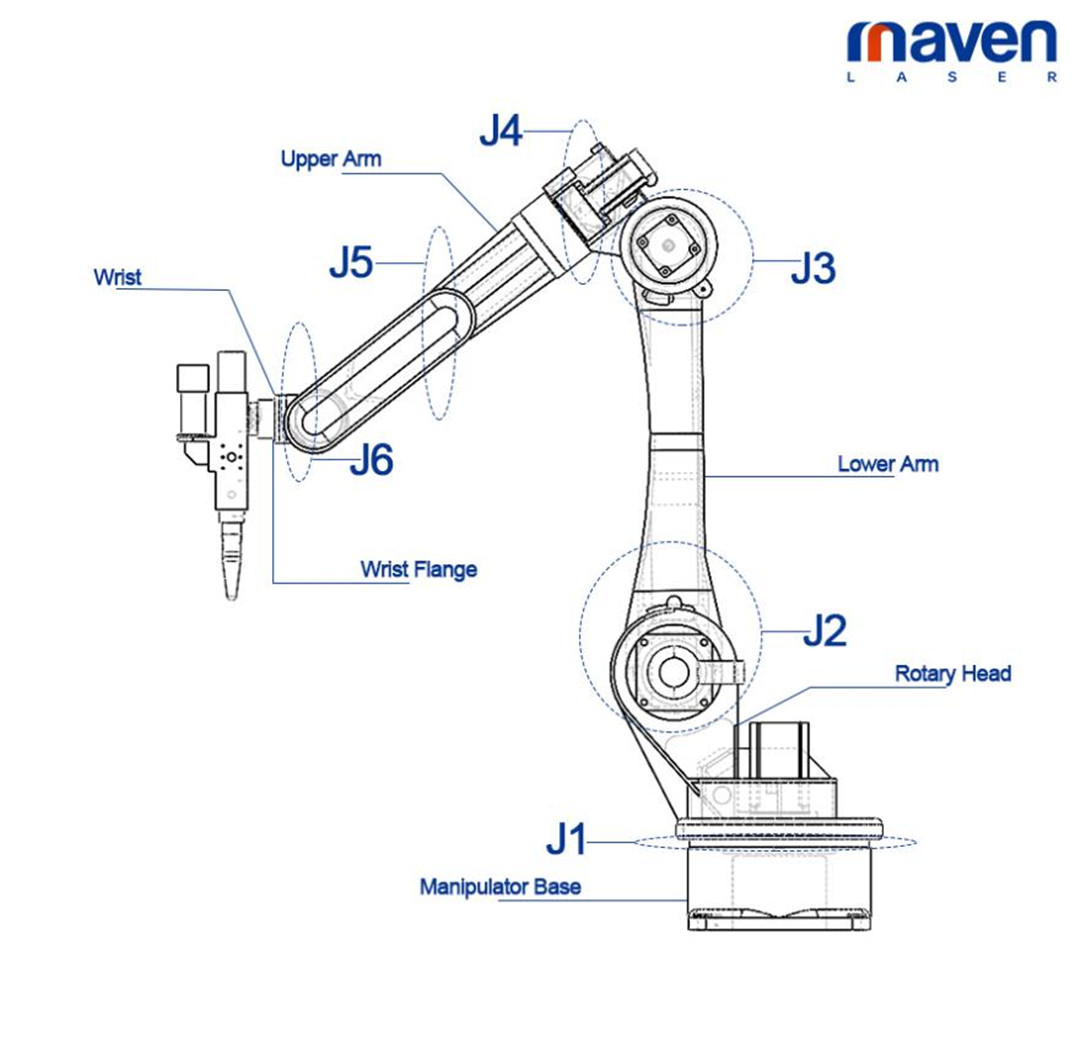
1. Sèvi ak mouvman robotik, apwopriye pou soude espas gwo fòma, ka sis-aks lyen.
2. Ka soude nan nenpòt espas, se vre wi: reyalize soude otomatik la nan nenpòt trajectoire nan espas.
3. Segondè presizyon repetisyon, ka repete soude a pou anpil fwa san erè, bon jan kalite a nan soude a pi estab.
4. Li ka ranplase operasyon manyèl, epi li ka lazè soude jaden konplèks ak danjere.
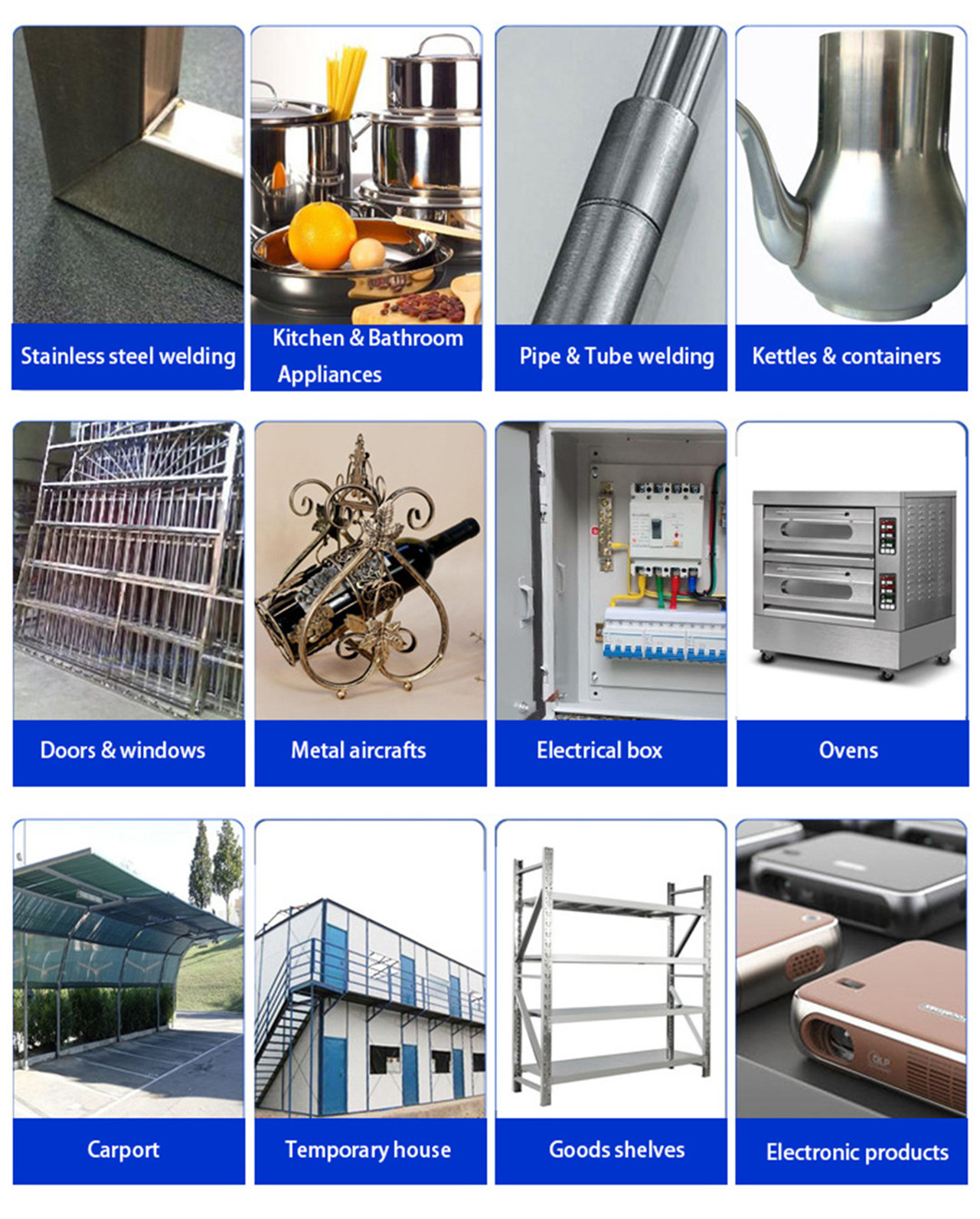
Zòn aplikasyon:
Kò oto, plak asye oto, plak anbreyaj, jaden soude difisil ak konplèks, konpozan mikwo-elektwonik, pati presizyon, konpozan dijital wo-klas, konektè fib optik, aparèy medikal, gwo soude mwazi, bòdi piki ak lòt soude.
SOLISYON SOUDE PWOFESYONÈL
Feeder fil ak soude konsantre sou pedal kontwòl la
0.08mm robo Pozisyon presizyon
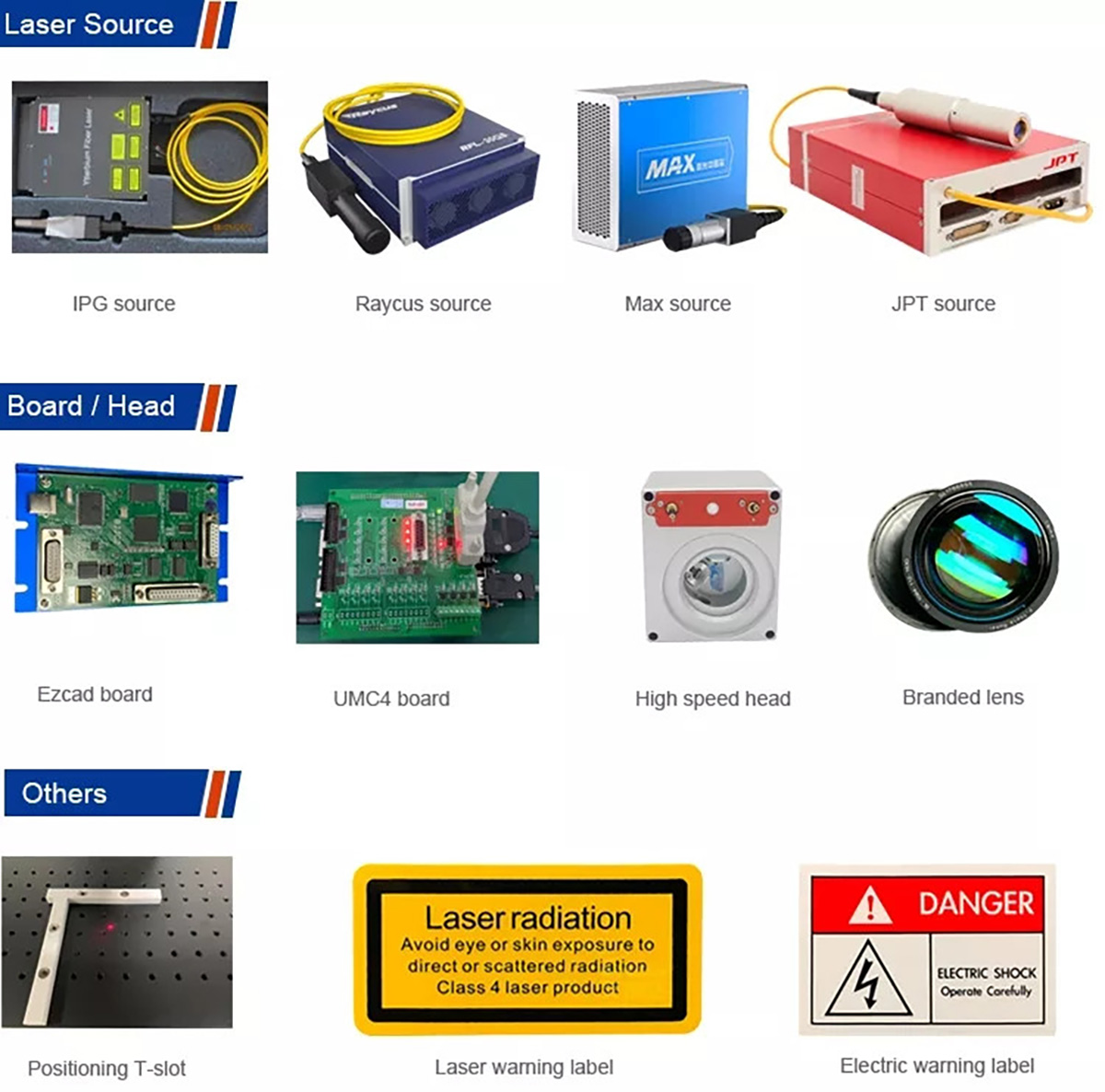
Raycus Max JPT IPG Lazè Sous Opsyonèl
Pèsonalizasyon nan tout sistèm
| Non pwodwi | Robot otomatik lazè soude machinMLA-W-A01 |
| Longèdonn | 1070+/-10 nm |
| Lazè pouvwa | 1000W 1500W 2000W 3000W |
| Ajisteman pouvwa | 10-100% |
| Longè fib | Estanda 10m oswa Espesifye |
| Metòd travay | CW / batman kè |
| Range vitès | 0-120 mm |
| Weld epesè | 0.5-6 mm |
| Kondisyon pou Gap soude | < 1 mm |
| Frekans modulasyon | 20KHZ |
| Limen / Off Tan | 20 Nou |
| Tanperati travay | 15-35 ℃ |
| Pwovizyon pou pouvwa | 220V/50HZ/30A |
| Metòd refrijerasyon | Dlo Refwadi Inbuilt |
| Gwosè machin | 990 * 540 * 1030 mm |





FASIL POU OPERE
Zanmitay itilize kontwolè pou koperasyon fasil ak enstriksyon soude fib lazè atizan konn fè
KONTÒL ENTÈGRASYON
Entegrasyon kabinè kontwòl la se kontwole fonksyon fil manje a. Ak pouvwa lazè a ka monte ak tonbe tou dousman pou anpeche sou boule. Ogmantasyon an dousman ak tonbe se espesyalman avantaje pou soude plak mens. Lè manipulateur a fini, li jeneralman pi fasil pou soude nan plak la.
LASE INTERGRATUION
Anplis de sa nan ajiste paramèt yo soude nan sistèm nan lazè. Li gen tou fonksyon chak limyè endikatè estati sistèm, chanjman dlo elektrik, ak rapèl otomatik pou pwoteje lantiy la.
TÈT ENTÈGRASYON
Tèt soude entegre, CCD sou tèt la, pouvwa reglabl, konsantre oto, operasyon pratik.
FASIL POU OPERE
Bouton teach pendant yo senp epi fasil pou konprann, epi pwogram ansèyman an ka aprann epi itilize byen vit. Si operasyon an mal, machin nan otomatikman sispann pou evite risk pou domaj ekipman yo.
TRAVAY EFIKASMAN
Yon fwa pwograme, li ka itilize tout tan an. MavenLaser Robot Arm sipòte 24 èdtan nan travay kontinyèl ak gwo presizyon ak gwo vitès. Operasyon totalman otomatik, yon robo ka ranpli kantite travay plis pase 2-3 moun pa jou.
PRI BA
Envestisman yon sèl fwa, benefis alontèm. Lavi sèvis robo MavenLaser se 80,000 èdtan, ki ekivalan a plis pase 9 ane travay san enteripsyon 24 èdtan. Li anpil ekonomize depans travay ak depans jesyon pèsonèl, epi rezoud pwoblèm tankou difikilte nan rekritman moun.
SEKIRITE AK Fyab
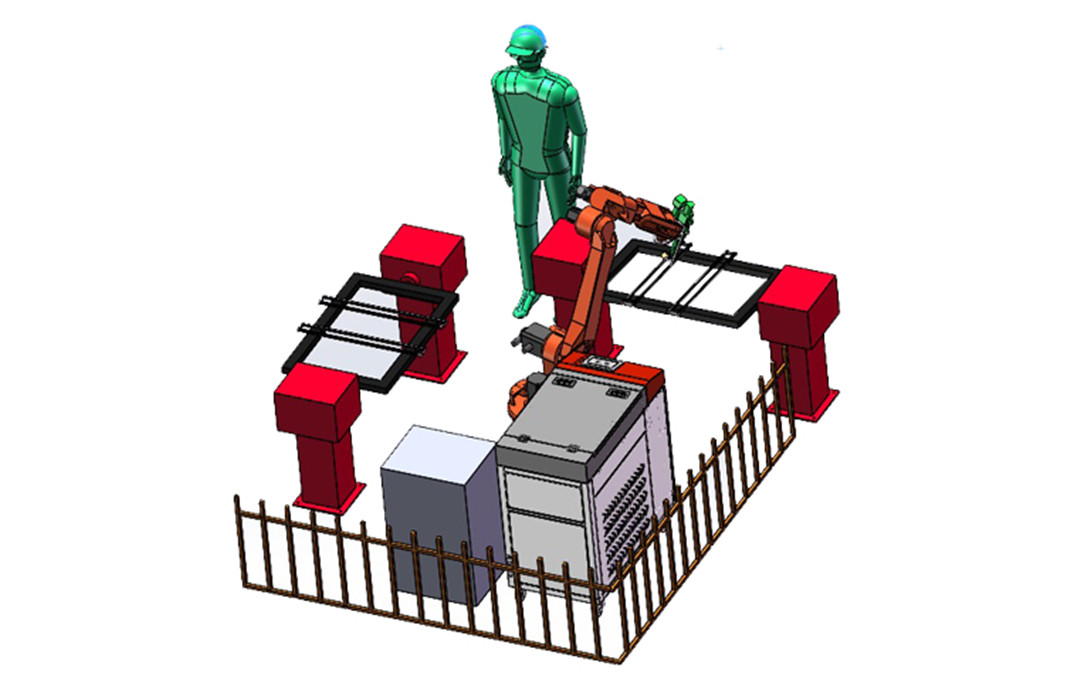
Bra robo MavenLaser ekipe ak mezi pwoteksyon sekirite fotoelèktrik. Lè objè etranje antre nan zòn travay la, li ka otomatikman alam ak sispann travay pou fè pou evite aksidan nan travayè.
SEKIRITE ENERGI AK ESPAS
Layout liy ekipman automatisation MavenLaser se senp ak pwòp ti anprint, pa gen okenn bri, limyè ak fò bra robo, konsomasyon pouvwa ki ba, saxing enèji ak pwoteksyon anviwònman an.
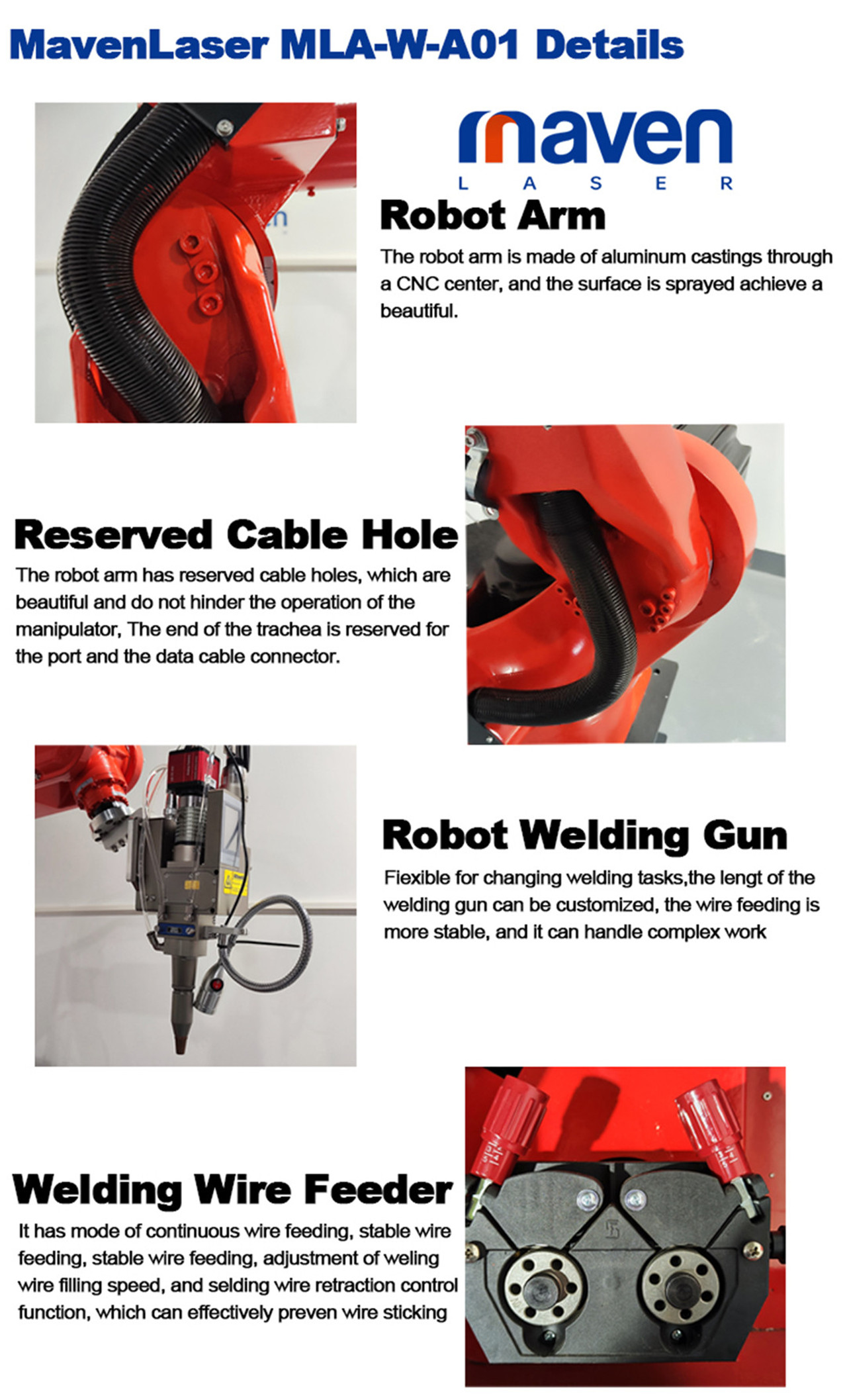
Jwèt Robo bra
Se bra a robo te fè nan depoze aliminyòm nan yon sant CNC, epi li se sifas la flite reyalize yon bèl.
Twou kab rezève
Bra robot la gen twou kab rezève, ki bèl ak nit anpeche operasyon manipulateur a, fen trachea rezève pou pò a ak konektè kab done yo.
Sou entènèt jwèt Robo Welding Gun
Fleksib pou chanje travay soude, longè zam la soude ka Customized, manje fil la pi estab, epi li ka okipe travay konplèks.
Soudi Fil Feeder
Li gen mòd nan manje fil kontinyèl, ki estab fil manje, ki estab fil manje, ajisteman nan welling fil ranpli vitès, ak selding fil retraksyon fonksyon kontwòl, ki ka efektivman anpeche fil rete soude.
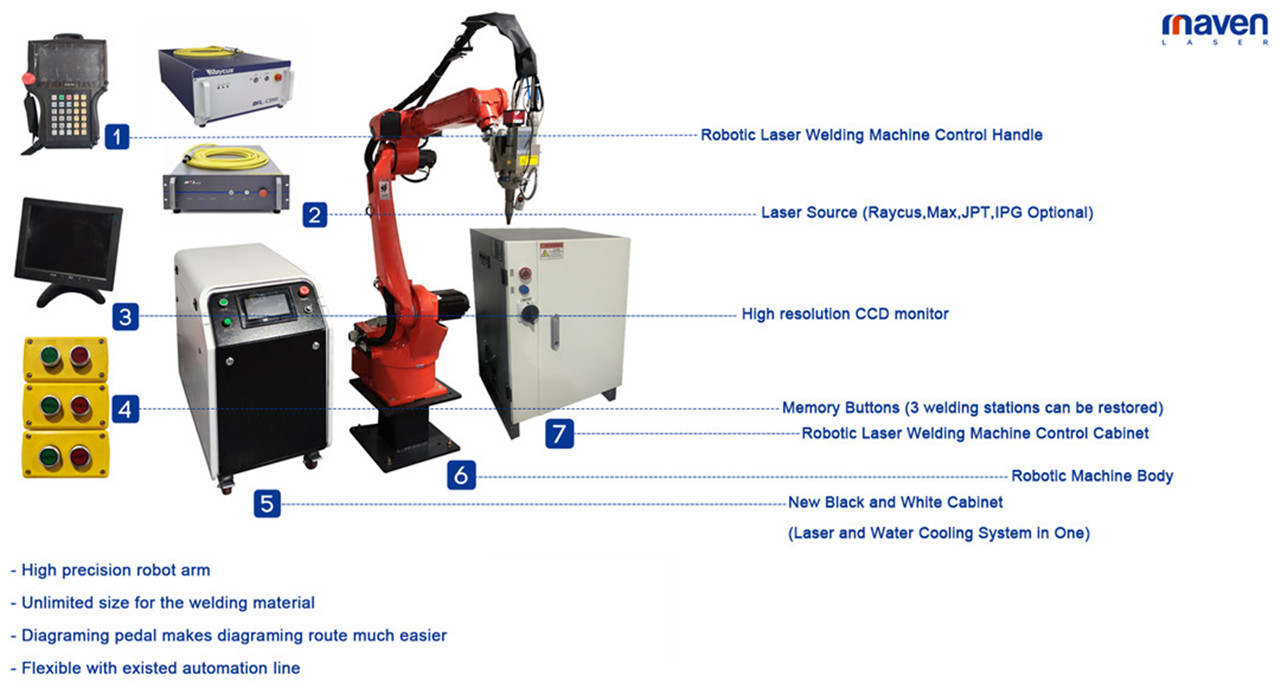
● Sous lazè (Raycus, Max, JPT, IPG si ou vle)
● Segondè rezolisyon CCD ki monitè kè bebe
● Bouton memwa (3 estasyon soude ka retabli)
● Nouvo kabinè nwa ak blan (lazè ak dlo refwadisman sistèm nan yon sèl)
● Robotics machin kò
● Robotics Lazè Soudi Kabinè kontwòl machin
● Segondè presizyon robo bra
● Gwosè san limit pou materyèl la soude
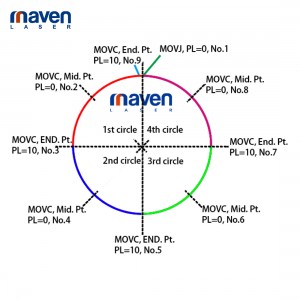
● Pedale dyagram fè dyagram wout pi fasil
● Fleksib ak liy automatisation ki egziste
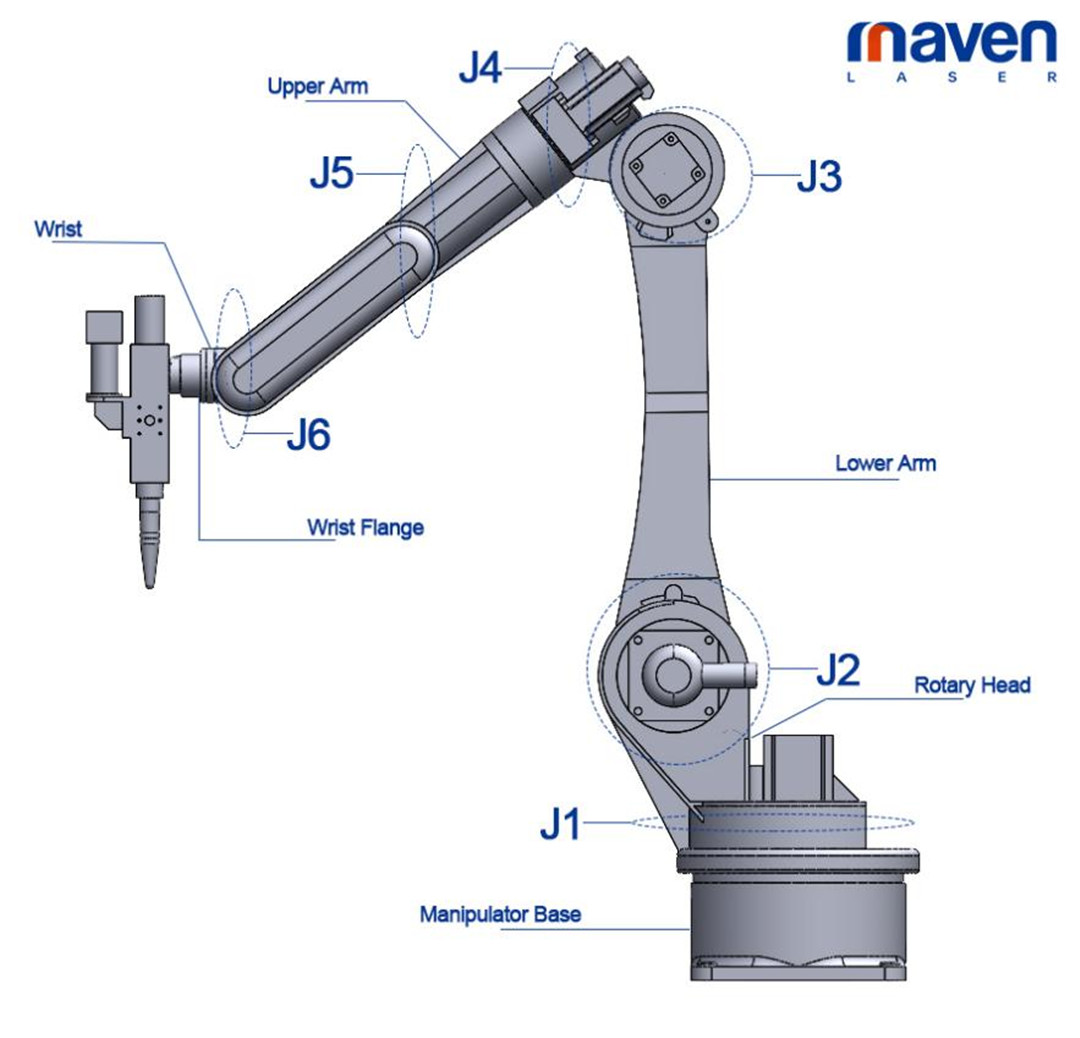
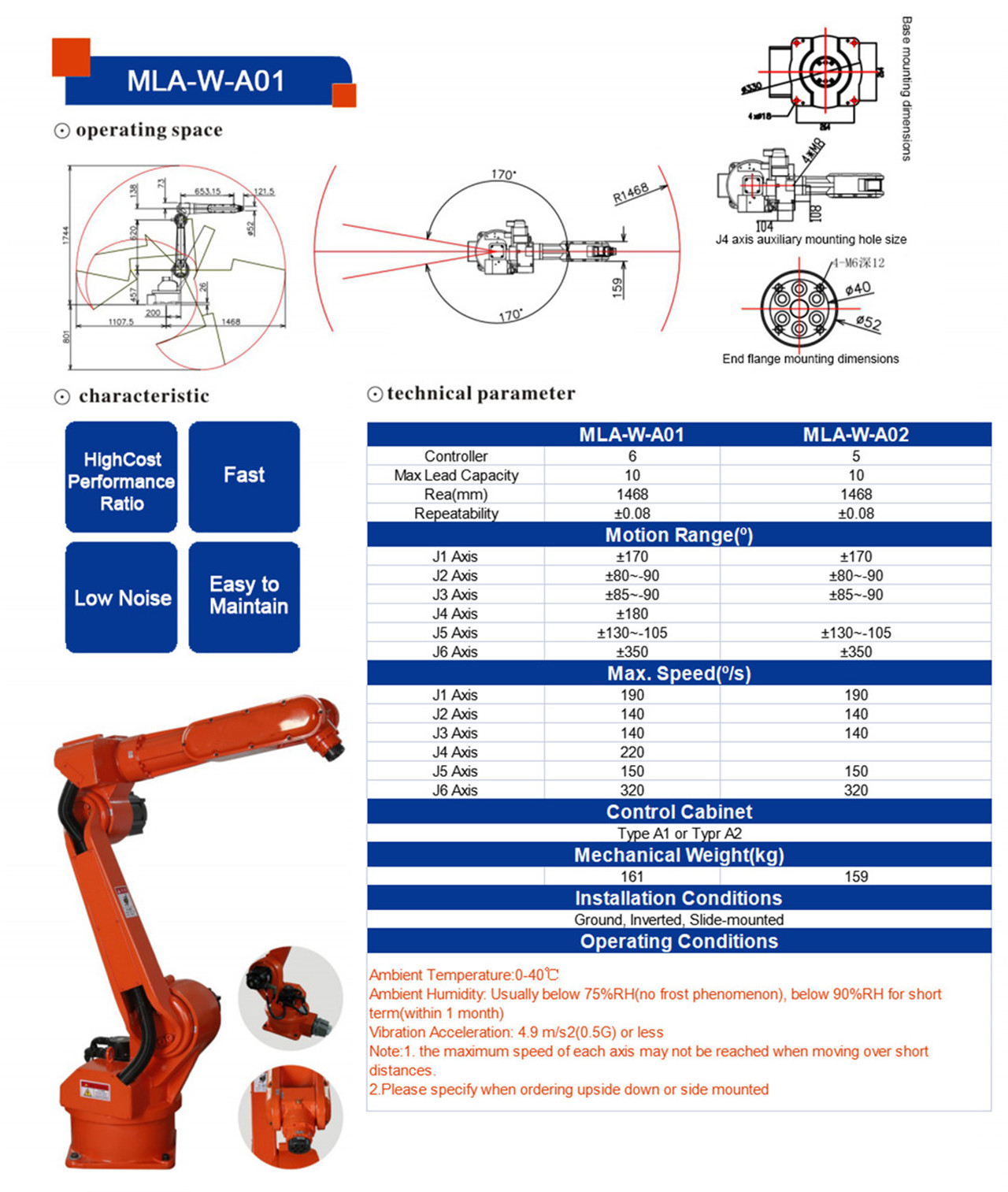
| MLA-W-A01 | MLA-WA02 | |
| Kontwolè | 6 | 5 |
| Maksimòm Kapasite Plon | 10 | 10 |
| Rea (mm) | 1468 | 1468 |
| Repetebilite | ±0.08 | ±0.08 |
| Ranje Mouvman (°) | ||
| J1 Aks | ± 170 | ± 170 |
| J2 Aks | ± 80~-90 | ± 80~-90 |
| J3 Aks | ± 85~-90 | ± 85~-90 |
| J4 Aks | ± 180 |
|
| J5 Aks | ± 130~-105 | ± 130~-105 |
| J6 Aks | ± 350 | ± 350 |
| Max. Vitès (°/s) | ||
| J1 Aks | 190 | 190 |
| J2 Aks | 140 | 140 |
| J3 Aks | 140 | 140 |
| J4 Aks | 220 |
|
| J5 Aks | 150 | 150 |
| J6 Aks | 320 | 320 |
| Kabinè kontwòl | ||
| Kalite A1 oswa Kalite A2 | ||
| Pwa mekanik (kg) | ||
|
| 161 | 159 |
| Kondisyon enstalasyon yo | ||
| Tè, Envèse, Glise-monte | ||
| Kondisyon Fonksyònman | ||
Tanperati anbyen: 0-40 ℃
Imidite anbyen: Anjeneral anba a 75% RH (pa gen okenn fenomèn jèl), anba a 90% RH pou kout tèm (nan 1 mwa)
Vibration Akselerasyon::4.9 m/s2(0.5G) oswa mwens
Remak: 1. vitès maksimòm chak aks pa ka rive lè w ap deplase sou distans kout.
2.Please presize lè kòmande tèt anba oswa bò monte
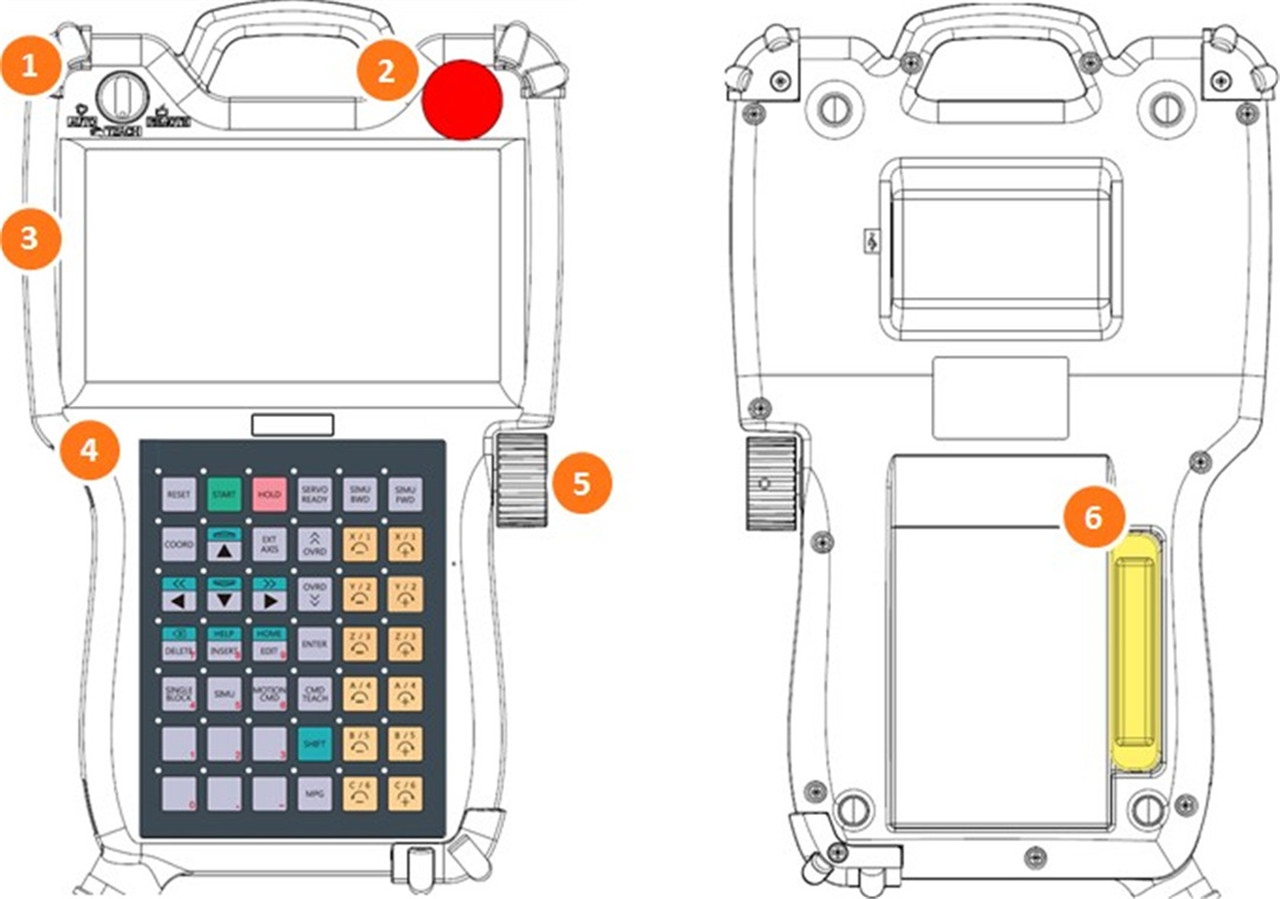
1. Chanje mòd
2. Arè Ijans
3. Ekspozisyon ekran
4. Kle Fizik
5. MPG (Manuel Pulse Generator)
6. Pèmèt Aparèy